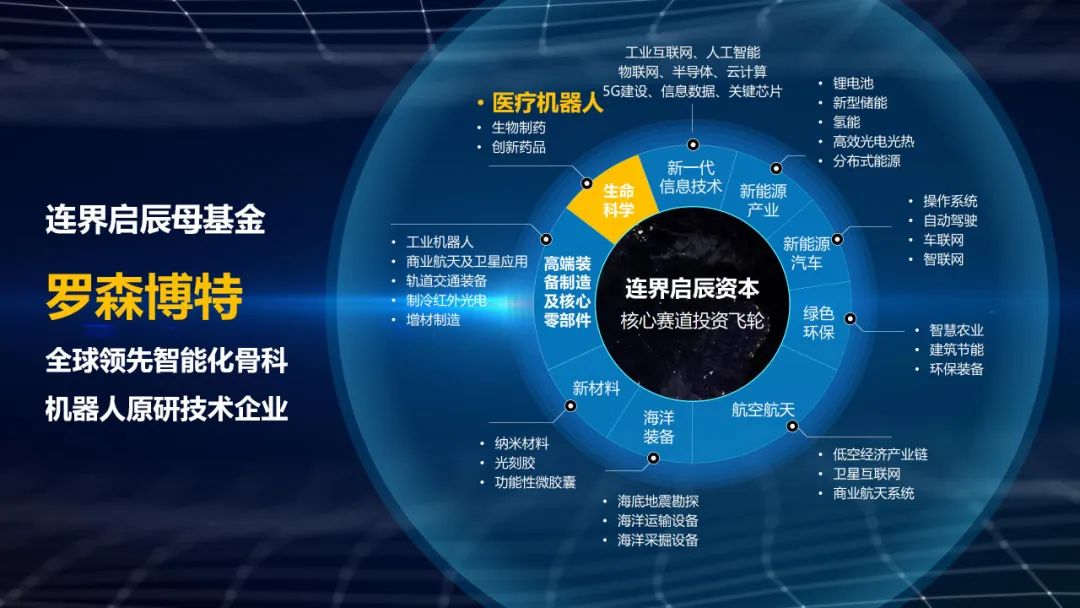
罗森博特:连界启辰母基金覆盖企业,成立于2017年9月,荣获国家高新技术企业、北京市专精特新“小巨人”企业、科技型中小企业、中关村高新技术企业等荣誉称号,致力于成为伟大的原创智能医疗产品和服务供应商。1、关键事件:罗森博特荣获2024全球手术机器人大会「手术机器人临床创新奖」2、核心趋势:人口老龄化+科技升级,驱动手术机器人持续发展4、创始团队:师承手术机器人之父,打造中国自己的手术机器人团队5、产业场景:人工智能+机器人,对未来诊疗体系的深远变革关键事件:罗森博特荣获2024全球手术机器人大会“手术机器人临床创新奖”为加快中国手术机器人在临床的应用,推动全球手术机器人的医工交流,第二届全球手术机器人大会暨MedRobot行业颁奖典礼于9月5日-9月6日在北京隆重举办。此次大会汇聚了众多行业精英,共计800位国内外政产学研领域专家,几十余家国内外机器人企业参会,共同探讨手术机器人的最新进展和未来趋势,罗森博特作为骨科手术机器人领先企业受邀参会。凭借卓越的临床创新能力,连界启辰母基金覆盖企业——罗森博特荣获“手术机器人临床创新奖”。一直以来,罗森博特致力于用创新智能医疗技术赋能医疗机构,推动临床治疗理念和模式的变革,为人类的健康做出贡献。
罗森博特始终专注技术创新,未来将投入更多研发资源,推动技术创新的边界,不断完善产品。这份殊荣不仅是对其持续努力的鼓励,更是创新之路上辉煌的见证。核心趋势:人口老龄化+科技升级,驱动手术机器人持续发展手术操作的发展距今已有200年历史,整体经历了从开放手术、微创手术向机器人辅助手术演变的阶段。是外科向智能化、数字化、微创化、个性化发展的重要技术支撑,是独一无二的平台型医疗器械;未来将会整合多种医疗器械,从诊断、治疗到康复,覆盖全周期医疗服务。受到人口老龄化、国家政策利好,以及深度学习算法的应用和机械辅助硬件升级的影响,手术机器人的需求量和供给量在同步提升,未来机器人辅助的手术在规模上将进一步扩大,市场渗透率将持续提升。在中国,手术机器人更是医工交叉、医疗科技成果转化的硕果。这里有最顶尖的医工交叉前沿团队和最落地的医疗应用场景。各手术机器人公司积极从临床端发现需求,解决问题,为临床医生提供更好用的高端工具。作为手术机器人领域的重要分支,骨科手术机器人近年来在临床实践中展示出强劲的发展活力。骨科手术,作为一项常规的、人为操作的手术,常被形象地喻为需要力量与精细技艺相结合的“木匠活”。然而,在实际操作中,人类在精准控制位置时,力量的控制往往难以兼顾;在进行精细操作时,手部位置和速度的精确控制又成为挑战。机器人技术的核心特性之一即为精准的力控和位置控制能力。即使在承受较大负载的情况下,手术机器人仍然可以进行匀速且精准的位置调整。在应对复杂手术操作,尤其是需要克服大负荷并实现精细位置和姿态调整的情境中,机器人显著优于人类。当前的人工智能与机器人技术有望在不远的未来对医疗领域的整体诊疗体系产生显著且深远的变革,医工交叉的必然性不容置疑。即便面临公众的担忧和疑虑,技术进步的步伐也不会因此停滞。罗森博特从创立之初便深耕于医工结合,深入研究了传统开放手术及徒手复位手术存在的难点及痛点,开发出了罗森万相®、罗森灯塔®、罗森天工®等一系列原研创新产品,真正做到智能化、微创化、标准化,以科技创新提升健康福祉。- 2021年,罗森博特骨盆骨折复位手术机器人通过医疗器械产品检测,同年在北京积水潭医院完成32例科研临床试验。
- 2022年,产品入选国家药监局创新医疗器械特别审查通道,并在全国6家医院开始多中心注册临床试验。
- 2023年12月8日,该中国“智造”产品正式通过创新产品注册申请,获批NMPA第三类医疗器械注册证,成为全球首个可以完成复杂骨折微创复位操作的手术机器人产品。
罗森博特团队研发骨科机器人已有将近20年的历史,这期间技术高速演变的过程清晰可见,但从过去到现在为止,大部分手术机器人还停留在医生的自动化工具阶段,而罗森博特骨盆骨折复位手术导航定位系统基于原创手术规划、图像配准、机器人智能控制技术,实现针对骨折的自动复位操作。罗森博特创新提出基于几何约束的自动手术规划技术,实现高精度、个性化的手术规划;建立基于力-位反馈的机器人控制技术,实现高负载下的高精度手术操作;创新术前-术中图像配准技术,实现骨折实时三维导航。该系统的研发显著提升了骨科手术机器人的智能化和自动化水平,填补了骨折复位机器人的国际空白。运用机器人推动术式和治疗方式变革是所有手术机器人发展的未来方向。在机器人辅助下,可以实现更微创、更精确的手术,大大提高患者获益。在研发过程中, 罗森博特克服了多个技术难题:1、个性化骨盆骨折规划:通过算法实现自动化的规划,大大提高精确度为了进行个性化的骨盆复位规划,团队利用各种算法实现了规划的自动化。王豫教授带领团队研究了自动规划的算法,引入了许多AI深度学习和统计学的方法。这些算法通过分析大量的临床数据和解剖学知识,让机器人能够自动地规划手术方案。相比于过去医生凭借经验和直觉判断,机器人的规划更加标准和精确。2、实时掌握骨盆的三维位置:基于图像配准的定位技术实现高精度导航为了实时掌握骨盆的三维位置,团队开发了基于图像配准的骨盆定位技术。王豫教授带领团队研究了新的三维导航算法,通过术前和术中的影像配准,机器人能够准确获取体内骨盆的实时三维位置。这项技术的创新性在于,不仅克服了骨折带来的骨骼移位问题,也无需术前对患者安装有创标记,保证微创的同时能够提供高精度的导航信息。3、精确运用力量移动骨盆:深入研究力学规律,设计出独特的复位方案为了精确运用力量移动骨盆,团队深入研究了骨盆骨折复位的力学规律。王豫教授和团队进行了大量的基础工作,从临床测力开始,研究如何有效地传递力量,克服软组织的阻力,最终将骨头恢复到原位。他们设计出了独特的复位方案,包括创新的"弹性牵引"概念,能够安全地克服复位过程中的软组织阻力。通过这些研究成果,机器人能够精确地应用力量,确保骨盆骨折复位的成功。创始团队:师承手术机器人之父,打造中国自己的手术机器人团队北京罗森博特科技有限公司(以下简称“罗森博特”)成立于2017年,公司创始人、董事长王豫是北京航空航天大学生物与医学工程学院副教授、博士生导师。- 早在2003年,王豫就参与了国内首例机器人辅助骨科手术和首例远程骨科手术。
- 2015年,王豫在最顶尖的“手术机器人之父”罗塞尔·泰勒教授实验室做项目,发现在手术机器人领域,中国有自己的优势,并且与全球顶尖学府的水平差异并不大。
- 2017年,王豫凭借自身扎实的知识技术和友人帮助,在海淀创办了专注于研发骨盆骨折复位机器人的公司——罗森博特。
罗森博特创始人王豫曾参与国家“863”计划,成功研发国内首台具备临床应用价值的骨科机器人,并转化为国内首个获得注册证的骨科手术机器人产品。在谈及罗森博特的创立初衷时,王豫表示,若科技成果仅止步于实验室的研究层面,未能转化为实际应用以造福临床领域,这将是一种无法弥补的遗憾。王豫进一步提到,积水潭医院吴新宝副院长曾多次提及骨盆骨折是创伤骨科领域的重大手术难题,目前仍缺乏理想的解决方案,这与罗森博特的创立初衷高度契合。2021年至今,罗森博特骨盆骨折复位手术机器人已与多家医院开展近200例手术,闭合复位成功率100%,优良率大于95%,无并发症,远超专家徒手复位治疗水平,突破了传统手术中医生手、眼、脑的局限,创新解决了医患切实需求。产业场景:人工智能+机器人,对未来诊疗体系的深远变革王豫指出,当前的人工智能与机器人技术有望在不远的未来对医疗领域的整体诊疗体系产生显著且深远的变革,医工交叉的必然性不容置疑。即便面临公众的担忧和疑虑,技术进步的步伐也不会因此停滞。他强调,即使某些技术在应用中确实存在潜在风险,也不能因此否定其临床价值和益处,更不能因此放弃其应用。他建议,应以理性和客观的态度看待医工交叉的发展趋势,在确保安全的前提下,充分发挥其潜力和优势,以推动医疗事业的持续发展。王豫表示,手术机器人研发需医生参与指导,手术机器人并非替代医生,而是辅助医生推动医疗科技进步。手术机器人能使医生更稳定地施展手术技能,提升手术精准度,进而实现稳定高效的输出,并优化临床治疗成效。针对这一实际的临床应用问题,董事长王豫提出三大核心技术,实现精准、稳定的机械臂力控:基于配准的实时三维导航技术,确保导航的精确性和实时性;自动化的复位规划技术,具备定量、真实且客观特点;融合了力和位置双控策略的机械臂控制技术,提升机械臂操作的精确度和稳定性。这三项技术共同构成了罗森博特的核心技术体系。公司从骨科创伤手术中难度最大、最依赖临床经验的骨盆骨折治疗出发,以数字化手段“复制”临床专家的实践操作,研发全球首创的智能化骨科机器人,推动手术机器人的自动化与智能化发展。涉及到手术机器人与骨盆手术的技术难点时,情况则变得尤为复杂,特别是对于力控机械臂而言,在处理骨盆结构时,复位操作的实施难度极大。此外,在解决机器人复位问题时,也面临着一系列技术挑战。传统的骨科医生在手术中主要依赖于影像资料的观察,并结合个人经验来评估复位效果,这种评估方式具有一定的主观性,其结果往往受到医生个人经验和能力的影响,特别是在处理如骨盆等复杂结构时,这种主观性可能导致复位精度的波动和不稳定性。